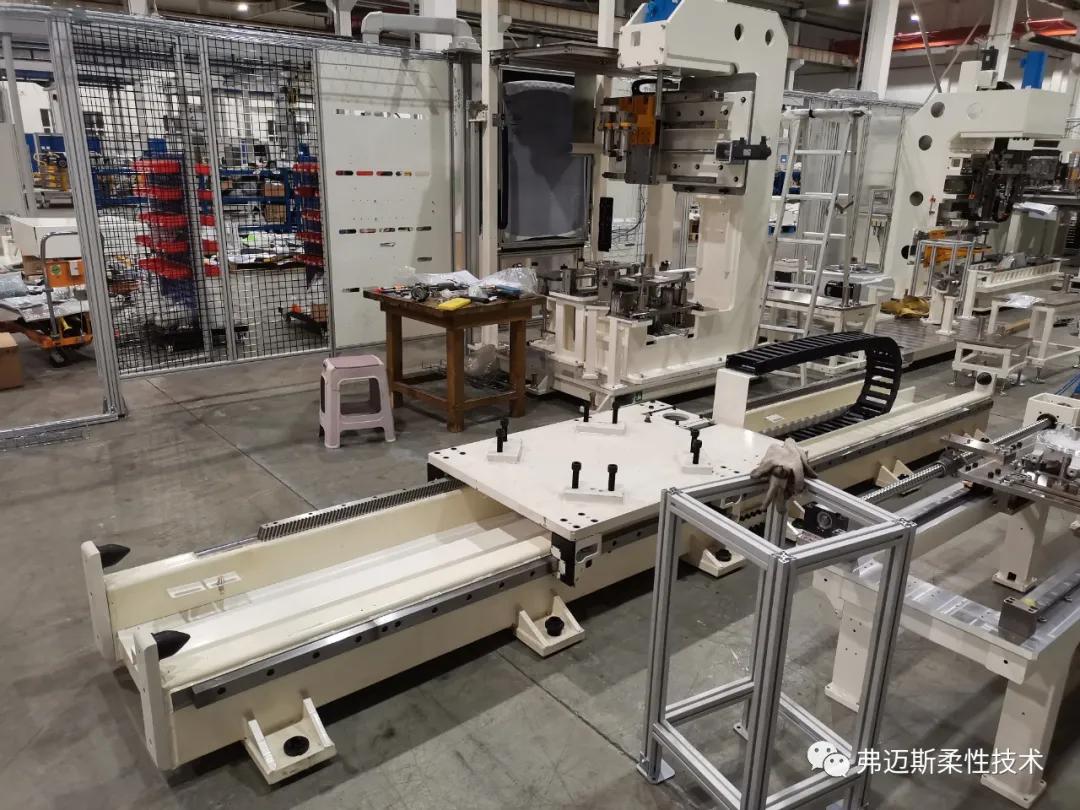
机器人第七轴 采用线性滑轨可增加作业空间或在机器人作业区移动工件和工具,如给多台设备或辅助工装,从货盘系列中进行货品组合作业以及在大型部件上作业等等。线性滑轨的控制装置是作为数学耦合轴枯竖消集成到机器人控制系统的,这样就无需其他控制装置了。

主要特点
第七轴系统的机械手移动小车在直线方向上的移动和定位可通过操作面板和显示屏进行编辑,在直线轴有效行程范围内,可设置多个定位点。位置精度由编码器精确检测,通过伺服系统控制电机重复定位精度在±0.05mm范围之内,移动速度在0-10m/min范围内根据客户操作要求任意设置。第七轴系统与六轴或多轴机器人的信号接口及机床系统接口用数字信号传输,保证相互之间的稳定性及可靠性。具备手动和自动两种运行控制方式,手动没知方式下可单独操作某一个工作,自动方式下按设定的运行程序自动运行。还有外用钥匙保护开关,急停按钮,软件功能和软硬件接口保证需方需求。
组成结构
机器人第七轴行走轨道系统主要有导轨基座,安装机械手的移动小车,控制系统,安全与防护装置组成。
导轨基座采用优质铸铁铸造而成,长度根据客户的实现需求定制,基座镶入高精度滚轮直线导轨和精密模数齿条,线性轴装有润滑系统,能持续提供自纤乱润滑和除尘刮屑系统。
安装机械手的移动小车承载能力3000KG,移动小车与机械手的链接尺寸符合通用机器人。伺服电机为主驱动通过变速器驱动齿轮齿条在导轨上行走。
控制系统有主控制柜、主开关、熔断器、马达过载保护、低电压保护、电源稳压、变压装置、操作面板和显示屏等组成。伺服控制单元可以编程逻辑控制器满足用户的要求。