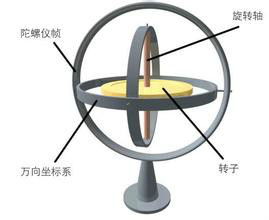
从力学的观点近似的分析陀螺的运动时,可羡中以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动。更确切地说,一个绕对称铀高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。陀螺仪的基本部件有: (1) 陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法米来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值); (2) 内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构); (3) 附件(是指力矩马达、信号传感器等)。根据框架的数目和支承的形式以及附件的性质决定陀螺仪的类型有:三自由度陀螺仪(具有内、外两个框架,使转子自转轴具有两宏如个转动自由度。在没有任何力矩装置时,它就是一个自由陀螺仪)。二自由度陀螺仪(只有一个框架,使转子自转轴具有一个转动自由度)。根据二自由度陀螺仪中所使用的反作用力矩的性质,可以把这种陀螺仪分成三种类型:速率陀螺仪(它使用的反作力矩是弹性力矩);积分陀螺仪(它使用的反作用力矩是阻尼力矩);无约束陀螺(它仅有惯性反作用力矩);现在,除了机、电框架式陀螺仪以外,还出现了某些新型陀螺仪,如静电式自由转子陀螺兄绝山仪,挠性陀螺仪,激光陀螺仪等。